컨벡스 헐 (Convex Hull) 알고리즘
이 글은 제 개인적인 공부를 위해 작성한 글입니다. 틀린 내용이 있을 수 있고, 피드백은 환영합니다.
개요
컨벡스 헐(Convex Hull, 볼록 껍질) 알고리즘은 2차원 평면에 여러 개의 점이 주어졌을 때, 그 점들을 모두 포함하는 가장 작은 볼록 다각형을 만드는 알고리즘이다.
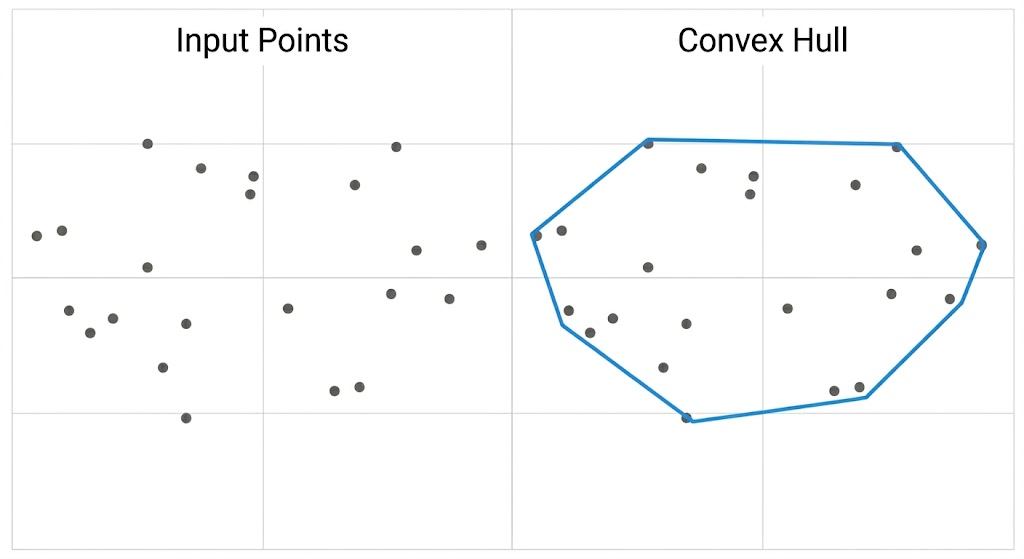
볼록 다각형은 다각형 내부의 임의의 두 점을 연결하는 선분이 항상 다각형 내부에 존재하는 모양이다. 즉, 내각이 모두 180도 미만이다.
컨벡스 헐의 꼭짓점이 되는 점들은 주어진 점들 중 가장 바깥쪽에 위치한 점들이다.
CCW
컨벡스 헐을 구현할 때 CCW를 사용한다. 세 점의 방향 관계를 파악하는 알고리즘으로 새로운 점(세번째 점)을 추가할 때 이 점이 왼쪽으로 꺾이는지(좌회전), 오른쪽으로 꺾이는지(우회전)을 판단할 수 있다.
CCW에 자세한 내용은 위 링크를 참고하자.
그레이엄 스캔 (Graham Scan)
그레이엄 스캔은 기준점을 잡고 각도로 정렬하여 한 바퀴 도는 방식의 알고리즘이다.
- y 좌표가 가장 낮은 기준 점 A를 찾는다. 점 A는 반드시 컨벡스 헐에 포함된다.
- CCW를 사용하여 다른 점들을 각도에 따라 정렬한다.
- 반시계 방향으로 각에 따라 점들을 접근하면서 선으로 이어준다.
- 세 점들을 이어 나가면서 우회전이 일어나지 않는 점들만 넣어준다.
- 우회전이 일어난다면 볼록 다각형이 아니다.
정렬하는데 O(N log N)이 걸리고, n-1개의 점들을 점검하는데 O(N)이 걸리므로 전체적으로 O(N log N)의 시간 복잡도를 가진다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
#include <algorithm>
#include <iostream>
#include <vector>
struct Point
{
long long x, y;
};
Point p0; // 기준점
long long distSq(const Point& p1, const Point& p2)
{
return (p1.x - p2.x) * (p1.x - p2.x) + (p1.y - p2.y) * (p1.y - p2.y);
}
long long ccw(const Point& a, const Point& b, const Point& c)
{
return (b.x - a.x) * (c.y - a.y) - (b.y - a.y) * (c.x - a.x);
}
bool compare(const Point& p1, const Point& p2)
{
long long order = ccw(p0, p1, p2);
// 각도가 같다면, 기준점과의 거리가 더 가까운 순으로 정렬
if (order == 0)
{
return distSq(p0, p1) < distSq(p0, p2);
}
return order > 0;
}
std::vector<Point> grahamScan(std::vector<Point>& points)
{
const int n = static_cast<int>(points.size());
if (n < 3)
{
return points;
}
// 1. 기준점 찾기
int minIndex = 0;
for (int i = 1; i < n; i++)
{
if (points[i].y < points[minIndex].y ||
(points[i].y == points[minIndex].y && points[i].x < points[minIndex].x))
{
minIndex = i;
}
}
std::swap(points[0], points[minIndex]);
p0 = points[0];
// 2. 반시계 방향 정렬
std::sort(points.begin() + 1, points.end(), compare);
// 3. hull을 이루는 점 탐색
std::vector<Point> hull;
hull.push_back(points[0]);
hull.push_back(points[1]);
hull.push_back(points[2]);
for (int i = 3; i < n; i++)
{
while (hull.size() >= 2 && ccw(hull[hull.size() - 2], hull.back(), points[i]) <= 0)
{
hull.pop_back();
}
hull.push_back(points[i]);
}
return hull;
}
int main()
{
std::ios_base::sync_with_stdio(false);
std::cin.tie(nullptr);
std::vector<Point> input = { {0, 3}, {1, 1}, {2, 2}, {4, 4}, {0, 0}, {1, 2}, {3, 1}, {3, 3} };
const std::vector<Point> result = grahamScan(input);
// Output : (0,0), (3,1), (4,4), (0,3)
for (const auto& elem : result)
{
std::cout << '(' << elem.x << ',' << elem.y << ')' << '\n';
}
return 0;
}
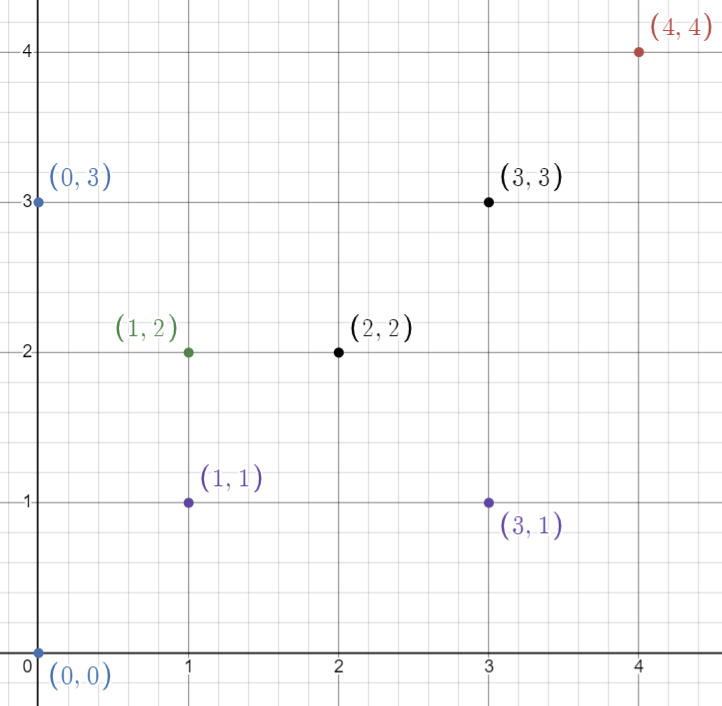
위 예제 입력에 대한 이미지이니 참고하자!
각도를 비교하는 compare 함수에서 CCW == 0인 경우, 일직선 상에 놓인 것이므로 기준점과의 거리를 비교하여 가까운 순으로 정렬한다.
모노톤 체인(Monotone Chain)
앤드류의 알고리즘이라고도 알려져 있는 모노톤 체인은 2차원 평면의 점들을 x 좌표 혹은 y 좌표 기준으로 정렬한 뒤, 컨벡스 헐의 윗껍질과 아랫껍질을 각각 구하여 완성하는 알고리즘이다.
그레이엄 스캔처럼 각도 정렬이 필요 없어 구현이 더 직관적이고 쉽다고 생각한다.
x축 정렬을 기준으로 이야기해 보자.
- 모든 점을 x 좌표가 작은 순, 같다면 y 좌표가 작은 순으로 오름차순 정렬한다.
- 아랫껍질(Lower Hull)을 생성한다. 세 점들을 이어나가면서 좌회전 하는 점들만 넣어준다.
- 마찬가지로 윗껍질(Upper Hull)을 생성한다.
- 아랫껍질과 윗껍질을 합치면서 중복되는 점(양 끝점)을 제거하면 전체 컨벡스 헐이 완성된다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
#include <algorithm>
#include <iostream>
#include <vector>
struct Point
{
long long x, y;
bool operator<(const Point& other) const
{
if (x != other.x)
{
return x < other.x;
}
return y < other.y;
}
};
long long ccw(const Point& a, const Point& b, const Point& c)
{
return (b.x - a.x) * (c.y - a.y) - (b.y - a.y) * (c.x - a.x);
}
std::vector<Point> monotoneChain(std::vector<Point>& points)
{
const int n = static_cast<int>(points.size());
if (n < 3)
{
return points;
}
std::sort(points.begin(), points.end());
std::vector<Point> lower_hull;
std::vector<Point> upper_hull;
for (int i = 0; i < n; i++)
{
while (lower_hull.size() >= 2 && ccw(lower_hull[lower_hull.size() - 2], lower_hull.back(), points[i]) <= 0)
{
lower_hull.pop_back();
}
lower_hull.push_back(points[i]);
}
for (int i = n - 1; i >= 0; i--)
{
while (upper_hull.size() >= 2 && ccw(upper_hull[upper_hull.size() - 2], upper_hull.back(), points[i]) <= 0)
{
upper_hull.pop_back();
}
upper_hull.push_back(points[i]);
}
lower_hull.insert(lower_hull.end(), upper_hull.begin() + 1, upper_hull.end() - 1);
return lower_hull;
}
int main()
{
std::ios_base::sync_with_stdio(false);
std::cin.tie(nullptr);
std::vector<Point> input = { {0, 3}, {1, 1}, {2, 2}, {4, 4}, {0, 0}, {1, 2}, {3, 1}, {3, 3} };
const std::vector<Point> result = monotoneChain(input);
// Output : (0,0), (3,1), (4,4), (0,3)
for (const auto& elem : result)
{
std::cout << '(' << elem.x << ',' << elem.y << ')' << '\n';
}
return 0;
}
중복 점 제거하는거만 신경쓰면, 구현이 더 직관적이라 개인적으로는 그레이엄 스캔보다 나은 듯하다.
문제 풀이
https://swexpertacademy.com/main/code/problem/problemDetail.do?contestProbId=AWIoKUq6rqUDFAWN
백준이 그립다. 컨벡스 헐 문제 찾기가 너무 어렵다…..
SW Expert Academy에서 한 문제 찾았으니 풀어보자…. 백준아 돌아와라
참고